- Produits
- Catalogues
- News & Trends
- Salons
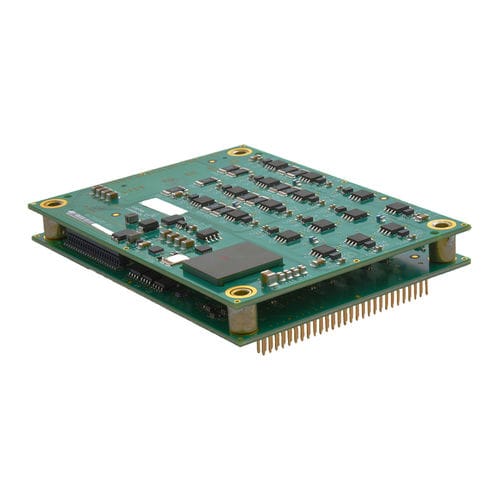
Servo-variateur DC ME4-055-034 axesnumériqueEtherCAT

Ajouter à mes favoris
Ajouter au comparateur
Caractéristiques
- AC/DC
- DC
- Nombre d'axes
- 4 axes
- Signal de sortie
- numérique, EtherCAT, CANopen
- Applications produits
- pour moteur pas à pas
- Autres caractéristiques
- compact, haute performance, à contrôle de couple
- Intensité
3 A
Description
Le ME4 est un entraînement à quatre axes, à haute performance, alimenté en courant continu pour la commande de moteurs pas à pas ou de servomoteurs via EtherCAT. Chaque axe est configurable pour piloter un moteur pas à pas, sans balais ou à balais. Grâce à la technologie FPGA avancée, le ME4 permet de réduire considérablement le coût par nœud en combinant les moteurs pas à pas et les servomoteurs dans un ensemble compact. Chaque axe du ME4 fonctionne comme un nœud EtherCAT sous DS-402 pour les dispositifs de contrôle de mouvement. Les modes pris en charge sont les suivants : Position/vitesse/couple cyclique, position/vitesse de profil, mode de position interpolée (PVT) et Homing. Le mode servo des pas à pas permet de contrôler la position, la vitesse et le couple. Le mode servo permet le contrôle de la position, de la vitesse et du couple par EtherCAT ou par PWM numérique. En mode micropas, les impulsions de commande des pas et l'encodeur maître pour la came ou l'engrenage sont pris en charge.
Spécifications
COURANT CONTINU
3A
ACTUALITÉS
3A
TENSION D'ALIMENTATION
14-55 VDC
DIMENSIONS
101.6 x 76,2 x 20,83 mm
ENTRÉES NUMÉRIQUES
24
SORTIES NUMÉRIQUES
8
FEEDBACK
Incrémental, salles numériques, encodeur auxiliaire/ sortie d'encodeur
INTERFACE DE COMMANDE
Étape/direction, analogique, PWM
ENVIRONNEMENT
Commercial
Modes de commande des servomoteurs
- Couple cyclique synchrone position-vitesse-couple (CSP, CSV, CST)
- Profil Position-Vitesse-Couple, Position interpolée, Accueil
- Indexeur, point à point, PVT
- Caméras, engrenages
- Position, vitesse, couple
Modes de commande des moteurs pas à pas
- Position synchrone cyclique (CSP)
- Profil Position-Vitesse-Couple, Position interpolée, Accueil
- Position/vitesse/couple (mode servo)
- Position (Microstepping)
- Indexeur, point à point, PVT
- Caméras, engrenages
Interface de commande
- Protocole d'application CANopen sur EtherCAT (CoE)
- ASCII et E/S discrètes
---
Catalogues
Aucun catalogue n’est disponible pour ce produit.
Voir tous les catalogues de Copley ControlsAutres produits Copley Controls
M-Series Multiaxis


Recherches associées
- Servo-amplificateur
- Contrôleur de moteur
- Servo-amplificateur DC
- Servo-variateur bus de terrain
- Contrôleur de moteur DC
- Contrôleur de moteur pas à pas
- Servo-amplificateur AC
- Servo-amplificateur brushless
- Servo-amplificateur numérique
- Servo-amplificateur CANopen
- Servo-amplificateur EtherCAT
- Servo-amplificateur compact
- Servo-amplificateur analogique
- Contrôleur moteur à entrées numériques
- Contrôleur de moteur AC
- Servo-amplificateur pas à pas
- Contrôleur moteur BLDC
- Contrôleur de moteur compact
- Contrôleur moteur programmable
- Contrôleur de moteur CANopen
* Les prix s'entendent hors taxe, hors frais de livraison, hors droits de douane, et ne comprennent pas l'ensemble des coûts supplémentaires liés aux options d'installation ou de mise en service. Les prix sont donnés à titre indicatif et peuvent évoluer en fonction des pays, des cours des matières premières et des taux de change.